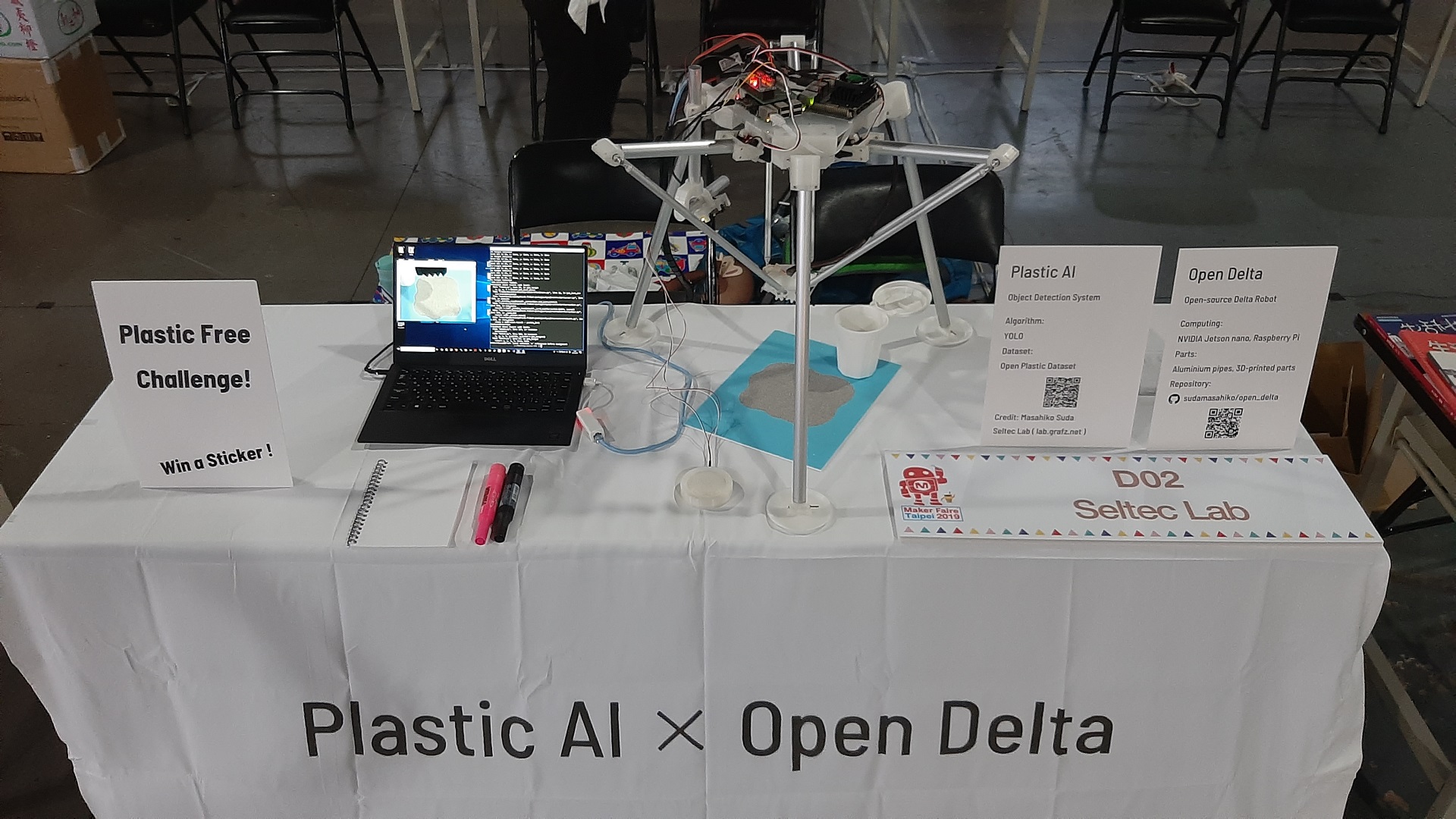
The project PlasticAI was exhibited at Maker Faire Taipei 2019.
The faire itself was full of people and tech-enthusiasts. And exhibitors were so creative that I’ve given additional inspiration from them. Especially it was so encouraging that there were a few people who were very interested in the project PlasticAI in terms of technologies and the marine environment. I greatly appreciate it.
The main takeaway from the show was “the AI does work”. The precision of detecting plastic bottle-caps was so good in spite of the fact that no training on any negative samples was done. But it also turned out that the AI is not enough if I want to pick something up in the real world because the object detection system tells no other information but the bounding box in the input image, which means there is no way to determine the actual distance between the actuator and the target object. Some extra sensors should definitely be added to do this job better.
To demonstrate PlasticAI in the exhibition, I have built a delta robot on which the AI to be put. The robot has 3 parallel link arms and is actuated with 3 servo motors. The main computer for the detection that I used is NVIDIA Jetson nano, which can perform full YOLO with approx 3.5 FPS. I will go into the details about the robot itself in the later article.

The strength of 3d-printed parts is acceptable for this demonstration. But I should try metal parts, too.
The Faire gives me a push. PlasticAI continues…